I was a little bit sad at the end of the summer, my favorite designer had left , so, to cheer me up, I start building a tricopter, using a carbon-fiber frame, some powerful motors, a digital servo, some ESC’s and a MW board…
The tricopter is a small model rotorcraft with three arms, this arms can be shaped (angled) as the letter Y, T, and in between, the angle in Y configuration is 120 degrees. The Y configuration brings to the system the best performance and simplest piloting.
The yawing of a tricopter is a special case. If you are using one rotor, it produces torque that tries to spin your vehicle into the opposite direction of the rotor. A helicopter uses its tail rotor to compensate this direction. A quadrocopter, hexacopter, octocopter an all copters with an even amount of rotors are using the fact that two rotors are in the same plane, both turning in opposite directions with the same speed, are neutralising their torque.
Arms and ESCs
Arms completed
Assembly almost ready
Ready
Uploading firmware
A tricopter has two rotors that are spinning in opposite directions (or in the same direction ) but there is a rotor left who produces torque that tries to spin the tricopter. Because of this, tricopters are usually using a rear servo to tilt the rear rotor to compensate this torque in the same manner a helicopter tail rotor does. The advantage of this solution is more yawing agility in comparison to multicopters with even amounts of rotors.
In the final tests of the maiden flight I change the angle of the arms, from \ | / to \ | | (asymmetrical arms) and I was able to fly it, but it was a little more complicated. When switching to the T configuration, the tricopter goes forward very very fast and its more hard to control and to hover it in place.
So, the main advantage of the tri is that the rear servo makes yawing much faster. And also are more agile than even-multicopters.
Thanks to Murray for sharing the maiden video, and giving me nice pointers to its dynamics.
note: in the video edition I wasn’t able to remove the words “Great Britain”… sorry for that…
Pues bueno… lets do a altitude test, I wanted cool pictures of my surroundings and of course test the limits of AlduxQuad, so, I did a couple of flights just with the idea of flight high 🙂
I was using the “position hold” mode, this mode automatically attempts to maintain the current location (based on GPS), heading (magnetometer) with manual throttle control. Wind gusts, PID’s setup and sensors will affect the effectiveness of maintaining position.
Panorama
Aldux Friends
Very high
This mode relies on the GPS which must be ON and indicating that is locked before takeoff. The heading can be altered with the yaw control stick.
On the first flight I was able to raise it up to 117 meters, I did this on the parking lot of the Scottish Exhibition and Conference Centre (SECC) because that place is always deserted on weekdays.
On the second flight I got to… better watch the video 😉 But on this video I change location due to the parking lot of the SECC was very close to a Heliport, and one helicopter pilot told I couldn’t fly there. The location I choose was the parking lot of the Riverside Transport museum and Tall Ship. I got a very strange behaviour, that I’m still trying to figure it out why it happen, at the highest point, the motors stopped, and AlduxQuad started falling… see the video for the exciting footage.
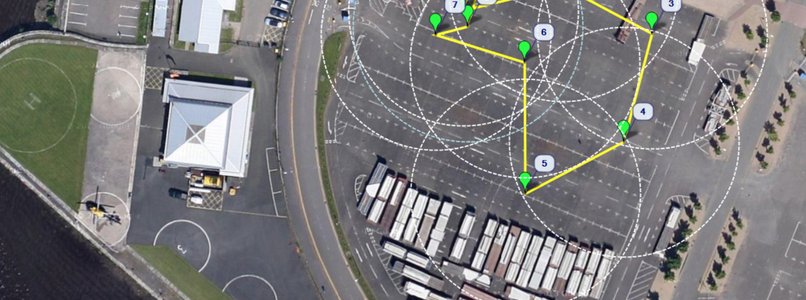
Mmmmm, how to begin????…. Well, simply by saying that this is my first flight doing waypoint navigation…
Waypoints are sets of coordinates that identify a point in physical space. Waypoints located on the surface of the Earth are usually defined in two dimensions (e.g., longitude and latitude). GPS systems are increasingly used to create and use waypoints in navigation of all kinds. A typical GPS receiver can locate a waypoint with an accuracy of three meters.
Having said that, I configured a set of waypoints to AlduxQuad and did a test. For security reasons, I did it in a parking lot that is usually with no cars, the only problem is that is close to a heliport, hehehe, I waited to the last aircraft to take off, and start to fly.
I did 3 successful tests, when Alduxquad was completing the last one, I hear a voice of a person (helicopter pilot) telling me I couldn’t fly there, in a very cool and proper manner, so I removed the auto feature and start to get it down to land it, but to be honest I was a little nervous, hehehe, so I lost the reference of the quad (nooooooobbbbbbbbb) and did a rough landing.
Waypoints
Just before crashing
Selfie after crash
But apart from everything it was a successful test.
Unmanned Aerial Vehicles (UAV’s) have become an increasingly area of study in the last years. This kind of vehicle does not require a human pilot to be physically present inside the aircraft which allows it to be used in dangerous situations or in hazardous environments (such as disaster areas). An specific class of these aerial vehicles know as quad-rotors (aircraft with 4 rotors) which are specially researched because of its capacity for hovered flights.
This part of the report proposes the design and test of an UAV quad-rotor prototype capable of act as a particle in a swarm of robots. Its important to mention that the embedded systems also know as avionics is based on popular DIY (do it yourself), open-hardware systems available to buy everywhere, we have bench-tested 3 of those systems.
Sketch
Frame, nuts and bolts
Assembly 1
Assembly 2
Almost ready to test
AlduxQuad is my second quadcopter built and the first documented one.
The frame is made from aluminium (550mm from rotor to rotor), two arms are black and the rest are red, just to have a better view of the X when flying.
Brushless motors don’t have the mechanisms necessary to rotate by itself so to make them rotate is necessary to use a device to energize each phase to generate the rotation correctly, hence the ESC’s. This motors are commonly chosen by their Kv rating. This rating refers to the rpm constant of the motor, is the number of revolutions per minute that the motor will turn when 1 volt is applied with no load attached to the motor. Is important to note that Kv does not have nothing to do with Kilovolt, is just a common way of referring to the constant by the manufacturers. Its more related to the power out of the motor, the torque level of it, its determined by the number of winds in the armature and the strength of the magnets, is a value that is always delivered by the manufacturer.
It’s important to mention that adjacent motors in the quad-rotor rotates on opposite directions. This is necessary because the total centripetal force generated by the rotation of the motors would make the quad-rotor rotate in the opposite direction to the rotation of the motors. Four propellers are used, two propellers for clockwise rotation and two for counter clockwise. The adjacent propellers have opposite attack angles because the clockwise motor demands clockwise propellers and the counter clockwise motor demands counter clockwise propellers.
I choose Turnigy brushless motors with 1050kv and a max current of 19amps.
The correct motor/prop combination needs to be chosen by considering the size and weight of the quad-rotor, the length of flying time and the power and agility desired. Propellers are listed by length and pitch typically ranging from 8 inches for higher Kv motors to as long as 12 inches for lower Kv motors. The size used in the actual quad-rotor are 10 inches with a 4.5 pitch because we selected a middle Kv motor.
The LiPo is a rechargeable battery that has the characteristics like high drive electrical current capacity, high charge storage capacity, several charge-discharge cycles. This batteries are chosen by 3 factors: power (amperes); the number of cells (voltage, each cell delivers 3.7 volts); discharge rate (its the capacity to discharge).
I have tested mainly 2 IMU autopilots that are available in the market today, the suggested platforms have similar structures, one is the Ardupilot (APM) and the other is MultiWii flight controller (MW).














 , so, to cheer me up, I start building a tricopter, using a carbon-fiber frame, some powerful motors, a digital servo, some ESC’s and a MW board…
, so, to cheer me up, I start building a tricopter, using a carbon-fiber frame, some powerful motors, a digital servo, some ESC’s and a MW board…




 ) but there is a rotor left who produces torque that tries to spin the tricopter. Because of this, tricopters are usually using a rear servo to tilt the rear rotor to compensate this torque in the same manner a helicopter tail rotor does. The advantage of this solution is more yawing agility in comparison to multicopters with even amounts of rotors.
) but there is a rotor left who produces torque that tries to spin the tricopter. Because of this, tricopters are usually using a rear servo to tilt the rear rotor to compensate this torque in the same manner a helicopter tail rotor does. The advantage of this solution is more yawing agility in comparison to multicopters with even amounts of rotors.