
MultiWii is a UAV autopilot system developed by RC hobbyists. This project uses an Arduino board as a main processor while the sensor system can vary. This project aims to make the fabrication of electronics easy. It uses gyroscopes and accelerometers of the commercial off-the-shelf Wii motion controller from Nintendo (at the early beginning), which needs less soldering. They define it as “MultiWii is a general purpose software to control a multirotor RC model.”
I have used it for several years now, and its great for entry level to this exciting world of vehicles that crash beautifully, I also use it inside my laboratory.
In my lab I develop the outer loop controller, like a hover controller for example, and the MultiWii acts as the inner loop controller… reads sensors, generate PWM signals among other things, and more importantly it tracks the attitude angle I command.
Of course to make the MW listens to my commands, I need to speak “its language”, and that one is the MultiWii serial protocol, also know as MSP.

I’m currently using a Raspberry Pi or similar as a companion computer onboard my vehicles, this computer is the one that will calculate and process the commands of the outer loop (hover controller eg,).
My companion computers therefore need to talk MSP… and precisely that is the purpose of this library.
I developed this library after spending too much time trying to use someones else code, I did it to be easy to use and easy to change. My definition is as follows:
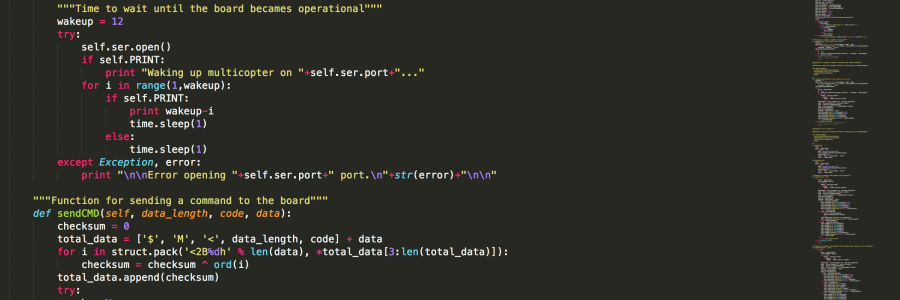
pyMultiWii handles the MultiWii Serial Protocol to send/receive data from boards.
Lets make a very easy example… Imagine that you need to get the vehicles attitude at 10 hz, this is how to do it:
[code lang=”python”]
serialPort = "/dev/tty.usbserial-A101CCVF"
board1 = MultiWii(serialPort)
while True:
print board1.getData(MultiWii.ATTITUDE)
time.sleep(0.1)
[/code]
Easy right??
You just need to create a MultiWii object with the proper serial port to address to, then just create a while loop (to cycle forever) and send a request of attitude to the board… and of course then “sleep” for 0.1 seconds in order to do it at 10 hertz.
Wait, its not limited to 10 hz!!! you can put the rate you want… The fastest I have tried with a naze32 board and an Odroid U3 companion computer has being something above 300 hertz!!!
I have successfully used my library for commanding vehicles in my lab, the multiwii boards tested have being:
- MultiWii AIO v2
- Naze32 (either baseflight or cleanflight)
This library has being used by several people around the world to create their own cool UAV projects (I’ve received multiple emails thanking me for this piece of code)…
I encourage people to use it, and let me know if they found mistakes or ways to make it better, its licensed as GPL and the only think I ask when using it, is that people cite me or the library.
Here are some nice videos of the library in action:
One thought on “pyMultiWii”