

Software in the loop, is a software testing technique that will help you test your software using simulations before doing it with real/physical systems. ASAM defines a generic simulator interface as:
Definition of an API between test automation systems and test-benches such as HIL-systems (hardware-in-the-loop) or SIL-systems (software-in-the-loop). Provides access to the simulation model, ECU internal measurement and calibration data, diagnostics data, the electrical error simulation unit and the ECU network. API is described as a technology-independent UML model.
In the case of our beloved drones, we will use SIL techniques to crash them virtually before attempting to test our software on real expensive hardware.
Thanks to the developer team from 3DR, they have developed a full simulator that allows you to run APM Plane, Copter or Rover without any hardware. It is a build of the autopilot code using an ordinary C++ compiler, giving you a native executable that allows you to test the behaviour of the code without hardware.
The main issue is that sometimes it gets tricky to make it work… or to make it properly…
This small guide will help people who is having problems make it work (also for me when installing it on new systems :P)
Assumptions:
- This guide is for Mac users (maybe I’ll make a post for windows…)
- If you have a android tablet, it will work as well (as complement)
- You know basic stuff on Mac (like using terminal, brew, pip)
- Brew, pip and python installed
Having said that, lets start the process…
Installation.
We need basically 3 things, dronekit, dronekit-sitl and mavproxy. MAVProxy is a command-line UAV ground station software package for MAVLink based systems. MAVLink is the “language” that our beloved drones talk.
Steps:
- Update brew:
brew update
- Update your pip:
pip install --upgrade pip
- Install Dronekit:
pip install dronekit
- Install SITL:
pip install dronekit-sitl
- Install MAVProxy (execute line by line:
brew tap homebrew/science
brew install wxmac wxpython opencv
pip uninstall python-dateutil
pip install numpy pyparsing
pip install MAVProxy
Usage.
The most simplistic usage for this set of tools, is to send commands to a simulated vehicle to take off and land… and see on the screen how is doing it.
To achieve this, we need to create a virtual vehicle and then connect MAVProxy to it, and make MAVProxy spread the information to several devices/applications.
Create a vehicle (on one terminal):
dronekit-sitl copter --home=55.870595,-4.287639,0,0
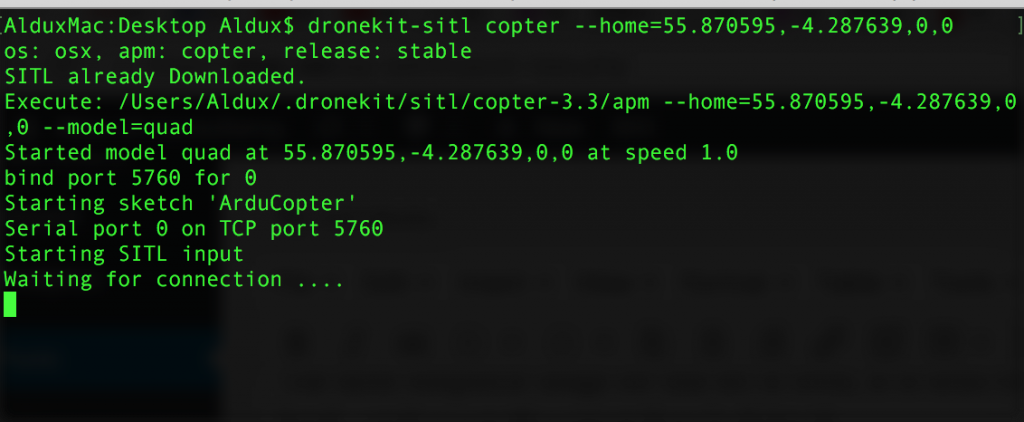
Allow me to explain what I’m doing on this command:
- copter -> SITL can do plane, copter, rover… I’m making this virtual vehicle a multicopter.
- –home=55.870595,-4.287639,0,0 -> Making the home of the vehicle outside of the building I work.
Start MAVProxy (on a different terminal):
mavproxy.py --master=tcp:127.0.0.1:5760 --out=udpout:192.168.1.9:14550 --out=udpout:127.0.0.1:14550 --out=udpout:127.0.0.1:14549
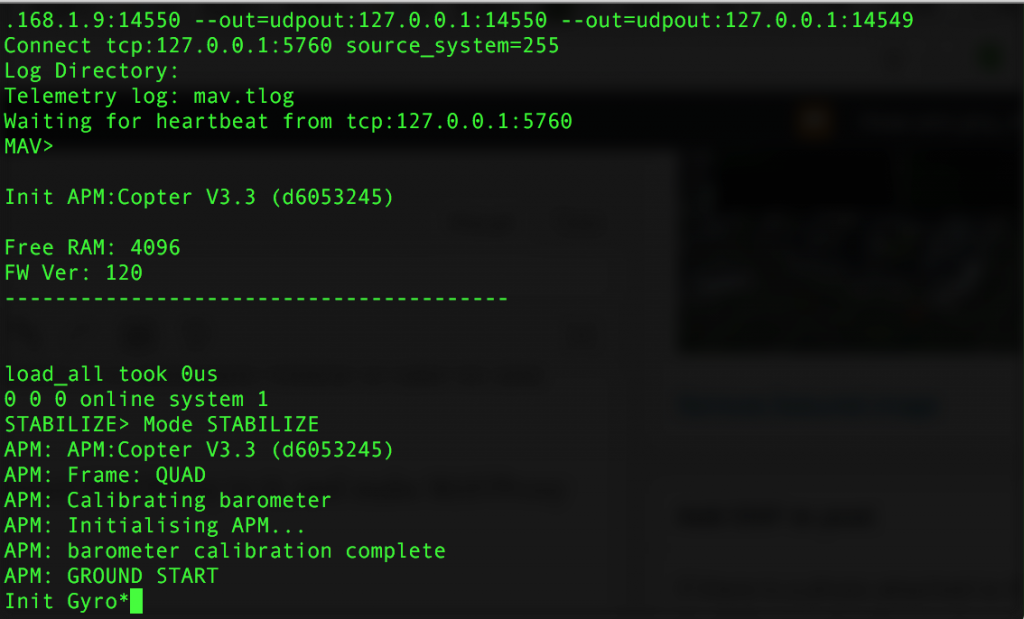
Allow me to explain what I’m doing on this long command:
- –master=tcp:127.0.0.1:5760 -> I here we declare how to connect this mavproxy instance with the virtual vehicle (drone-kit-sitl creates a TCP connection with a specific port and waits until something connects… In our case, MAVproxy will connect to it.
- –out=udpout:192.168.1.9:14550 -> I’m making mavproxy proxy all of the information is receiving from the virtual vehicle to a particular IP using UDP… this IP happens to be the one of my tablet. So, as long as my tablet is connected to ALTAX-network, it will be receiving the information of the virtual vehicle.
- –out=udpout:127.0.0.1:14550 -> Same as above but using localhost, so… mavproxy will proxy the information to my mac using UDP… sounds kinda weird, but this is for using another application like “APM Planner” or “qgroundcontrol” and see the same information as the tablet will see.
Open applications:
Now, whats rest to do is open a application that will show us “graphically” how the vehicle is doing… just as if it was REAL!! so, go and open “qgroundcontrol” on the mac…
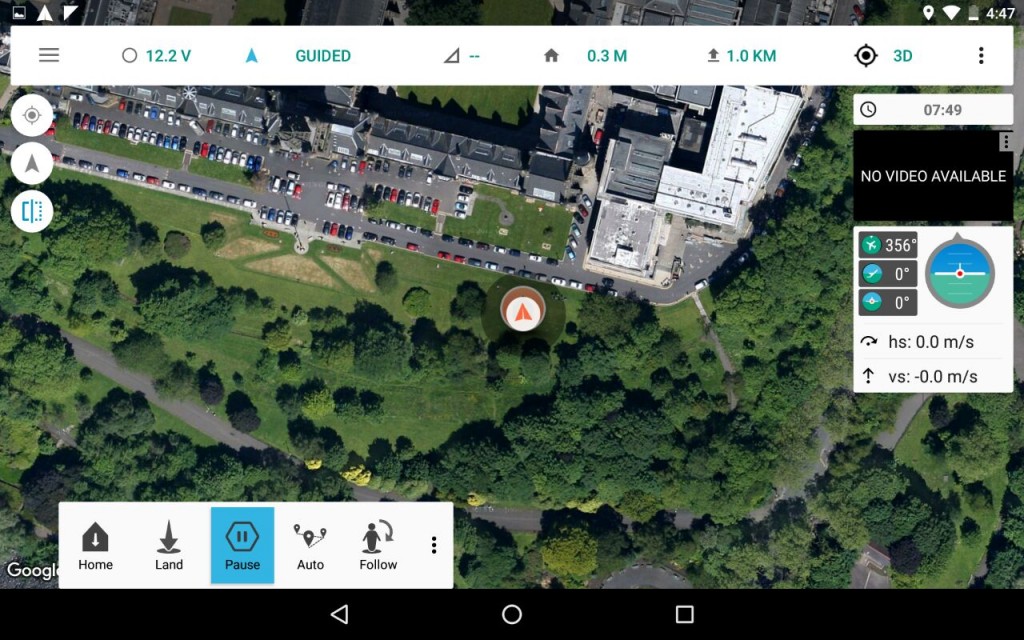
And on the tablet, open “Tower”, and change the telemetry connection type from “usb” to “udp”… thats it!
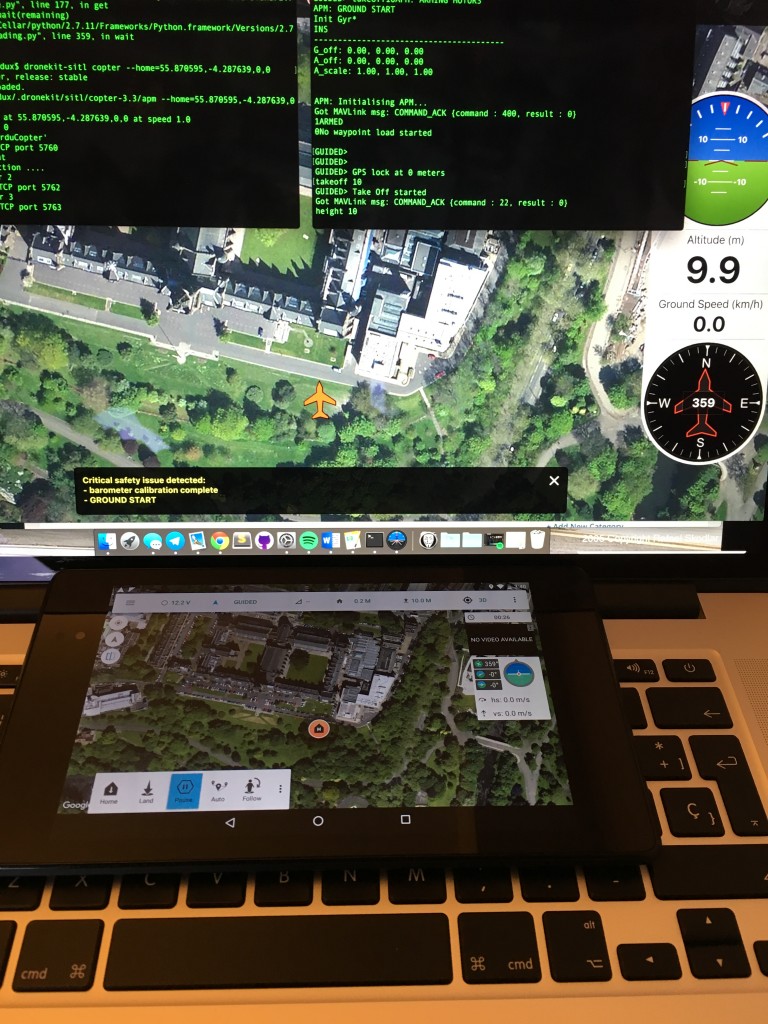
Take off!
Ok, let make the vehicle move or do something fun… execute this lines (as they are written, literally) on the terminal window that is running MAVProxy:
- mode guided
- arm throttle
- takeoff 1000
With this commands you will make the vehicle start flying till it reaches 1000 meters (mental!!!) and then wait, or “loiter”, of course, the battery will start to run out, but no worries, is virtual!
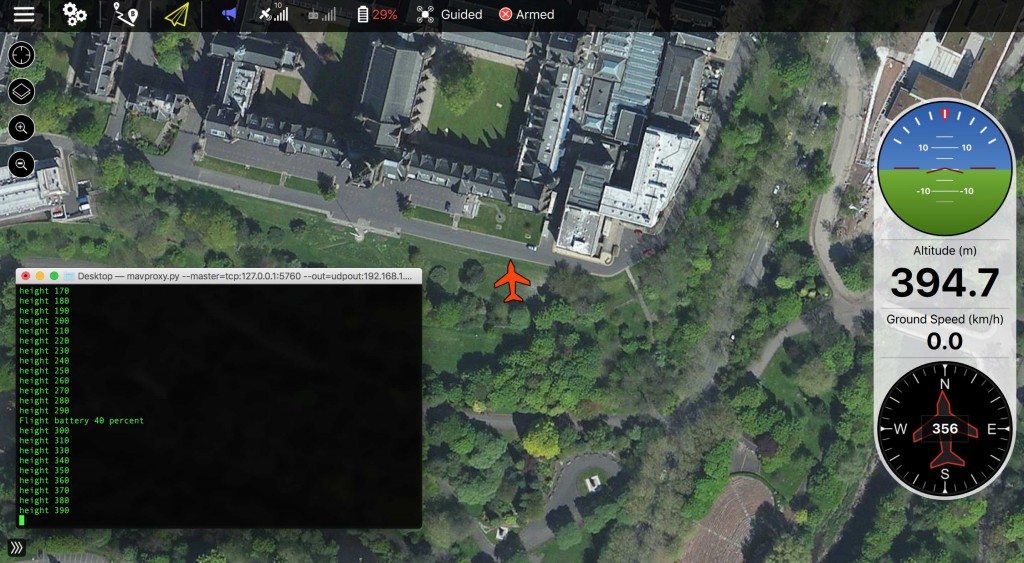
If you want your vehicle to land, then just type: “mode land”
Congratulations, you just made a virtual vehicle take off, fly to 1000 meters and then hit ground at 0.509052 m/s. Go have a beer, you earn it.
hello there and thank you for your information – I have definitely picked
up anything new from right here. I did however expertise several technical
points using this website, since I experienced to reload the site many times previous to I could
get it to load correctly. I had been wondering if your hosting is
OK? Not that I’m complaining, but sluggish loading instances times will sometimes affect your placement in google
and could damage your quality score if ads and marketing with Adwords.
Anyway I’m adding this RSS to my e-mail and can look out for much more
of your respective exciting content. Ensure that you update
this again very soon.. Escape roomy lista
always i used to read smaller content which also clear their motive, and that is also happening with this paragraph which I am reading here.
Good web site you have here.. It’s difficult to find quality writing like yours these days. I honestly appreciate individuals like you! Take care!!
I’m extremely pleased to find this website. I wanted to thank you for your time for this particularly fantastic read!! I definitely loved every part of it and I have you saved to fav to see new things in your site.
I used to be able to find good information from your content.
I quite like looking through an article that can make people think. Also, many thanks for allowing for me to comment.
Very good post! We will be linking to this particularly great article on our website. Keep up the good writing.
An outstanding share! I’ve just forwarded this onto a co-worker who has been conducting a little homework on this. And he actually ordered me dinner due to the fact that I discovered it for him… lol. So allow me to reword this…. Thank YOU for the meal!! But yeah, thanks for spending some time to discuss this subject here on your internet site.
Greetings! Very useful advice within this article! It’s the little changes which will make the biggest changes. Thanks a lot for sharing!
This blog was… how do I say it? Relevant!! Finally I have found something which helped me. Kudos!
You should take part in a contest for one of the greatest blogs on the net. I am going to highly recommend this blog!
I’m amazed, I have to admit. Seldom do I encounter a blog that’s both educative and interesting, and let me tell you, you’ve hit the nail on the head. The issue is something too few people are speaking intelligently about. Now i’m very happy that I came across this in my hunt for something concerning this.
I was pretty pleased to discover this great site. I need to to thank you for ones time due to this wonderful read!! I definitely savored every bit of it and i also have you book-marked to see new stuff on your blog.
bookmarked!!, I like your site.
Aw, this was a very good post. Spending some time and actual effort to make a really good article… but what can I say… I put things off a lot and don’t manage to get nearly anything done.
It’s hard to find educated people about this subject, but you sound like you know what you’re talking about! Thanks