
This was my second quadcopter build, but first one documented… The post is here.
Built for fun and to learn to fly a quadcopter. More than capable to carry a GoPro.
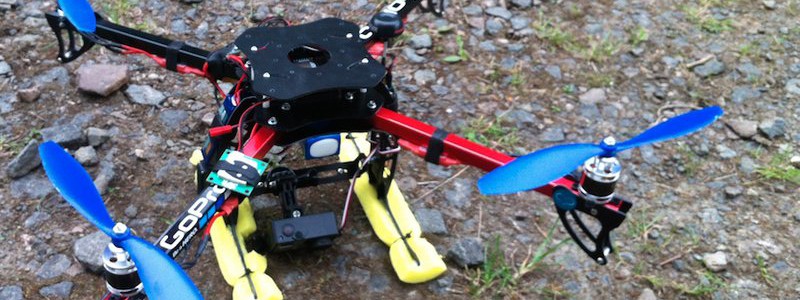
Specs:
- Motors: Turnigy Aerodrive 940kv
- Props: 10 x 4.5 SF
- Flight controller: APM
- ESC: 25 amps Turnigy
- Frame: 500mm from rotor to rotor, aluminium
Current configuration:
- APM 2.5 (upgradable and reprogrammable, original, not clone)
- GPS uBlox with 3D printed case for extra protection (color red), excellent waypoint navigation
- Voltage / Current sensor connected to the APM
- Extra visible navigation LED stripes (blue for forward and red indicates back)
- Turnigy 9x RX / TX (1000 meters range in LOS)
- 3D printed anti-vibration mount for the flight controller (providing excellent loiter)
- Runs great on 2200 mAh LiPo batteries (10 min flight times)
Current pics:






Some extra pics:




And some videos made with this vehicle: